
惯性测量
惯性测量是测量物体三轴姿态角(或角速率)以及加速度的装置。一般的,一个IMU包含了三个单轴的加速度计和三个单轴的陀螺,加速度计检测物体在载体坐标系统独立三轴的加速度信号,而陀螺检测载体相对于导航坐标系的角速度信号,测量物体在三维空间中的角速度和加速度,并以此解算出物体的姿态。
民用领域
外界有加速度输入时,摆片受惯性力作用将离开平衡位置。此时由摆片上下表面与上下力矩器端面组成的差动电容容值将发生改变,这一电信号通过接线柱输出至伺服回路。经过放大的电流信号输出至线圈,利用通电导线在磁场中受到的安培力经推挽作用使摆片回复平衡位置。在摆片偏转角度很小的情况下,该电流近似与输入加速度呈线性关系。此时检测该电流就能得到输入加速度大小。

组合导航
是一款基于MEMS技术融合了卫星导航技术的性价比极高的测量设备。广泛于导航、控制和动态测量,系统通过多项补偿技术保证测量精度。
无人机领用
在未来战争中。高、中、低空和远、中、近程等各类型军用无人机将分别执行侦察预警、跟踪定位、特种作战、中继通信、精确制导、信息对抗、战场搜救等各类战略和战术任务,今后其军事运用范围和领域必将不断扩大和拓展。

小型制导炸弹
制导炸弹投放后能对其弹道进行控制并导向目标的航空炸弹。制导炸弹是在普通航弹的基础上增加制导装置而成的,增大了起稳定性的尾翼翼面,一般没有推进系统或仅装有小动力推进系统。虽然它的射程较近,机动能力有限,但结构简单造价低。

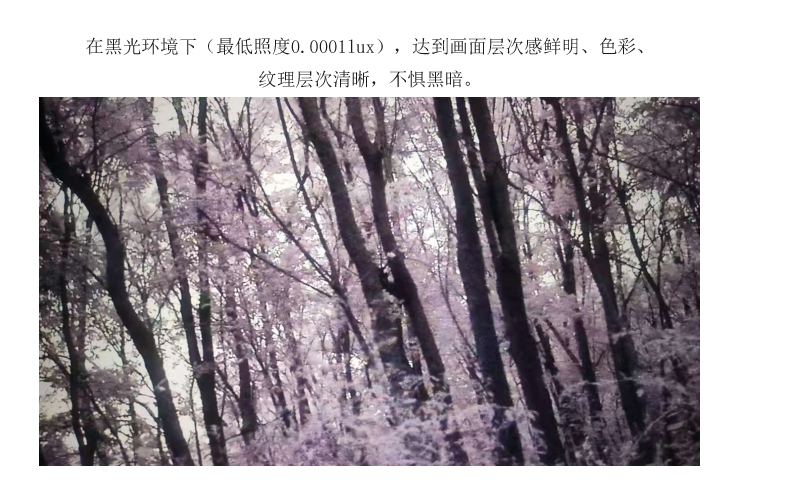
探测感知
图像融合技术是将不同类型的光电成像传感器获取的同一景物图像进行几何配准,然后采用一定的算法将各图像中所含信息优势或互补性有机结合起来,产生新的图像,提高了光电系统的识别探测能力。
提供实时动目标自动检测功能是通过分析视频中全局运动和个体运动的差异,从而自动进行运动物体的检测。在对每帧图像进行运动物体检测的基础之上,再在帧间进行匹配,实现时域上的连续跟踪。通过连续帧滤波的方法,可提取长时间的物体轨迹,并将物体运动航迹叠加到当前画面中去。
全景图像拼接功能。多传感器图像无缝拼接是实现全景光电探测系统的重要环节,通过图像拼接形成的拼接图有效的扩大了传感器视场。对于具有一定重合区域的相邻传感器图像,在畸变校正后,首先需要图像变换,将在同一视点向两个不同的方向观测图像变换为同一视线方向;随后,是最为关键的一步,对两幅图像实施图像配准,对于对重合区域提取特征点并对相邻图像特征点匹配获取图像的配准参数,并根据配准参数变换配准图像;最后选择合适融合算法对两幅图像灰度均衡消除拼接缝。
夜视领域
车辆夜视辅助驾驶系统具有图像融合,多路图像显示,图像切换,图像存储回放,行车辅助线和倒车测距功能。产品由前视单元,后视单元,侧视单元,前视照明组件,显示单元,控制单元,接线盒和电缆组成。可实现车辆在夜间行车时对路况的实时显示和记录,辅助驾驶员在夜间开展行车作业。
特种车辆应用领域
车辆夜视辅助驾驶系统用于感知全天候车辆机动条件下车体周围环境信息,实现行车环境可视化、障碍识别等,能够辅助驾驶员通过驾驶员视野和视觉强度,提高车辆机动安全性。


长按屏幕识别二维码
打开手机扫描二维码